Pocos recursos, pero con grandes sueños: estudiantes ticos van tras reto aeroespacial

Estudiantes de la Universidad de Costa Rica se preparan para participar en el ARLISS 2025 que se llevará a cabo en Nevada, Estados Unidos
Estudiantes del Grupo de Ingeniería Aeroespacial (GIA) de la Universidad de Costa Rica (UCR) representarán al país en el evento A Rocket Launch for International Student Satellites 2025 (ARLISS, por sus siglas en inglés), que se llevará a cabo en Nevada, Estados Unidos.
El proyecto ARLISS es una iniciativa colaborativa entre estudiantes y profesores de universidades de todo el mundo —principalmente de Japón—, cuyo objetivo es que cada equipo diseñe un dispositivo (puede ser un rover, un dron u otro artefacto) que cumpla con ciertas dimensiones y requisitos técnicos, y que pueda ser lanzado dentro de un cohete.
El cohete —del tamaño de una lata de refresco (CanSat)— lanza el dispositivo a una altura de entre 3 y 4 km. Una vez en el aire, el dispositivo se libera, despliega su paracaídas y comienza su misión de forma autónoma.
Costa Rica participará con dos equipos (uno básico y otro avanzado) en la competencia, que se desarrollará del 7 al 14 de septiembre en el desierto de Black Rock.
Ambos equipos cuentan con la mentoría de Francisco Segura, quien ha brindado apoyo en las distintas etapas del proyecto y en la organización del viaje al desierto.
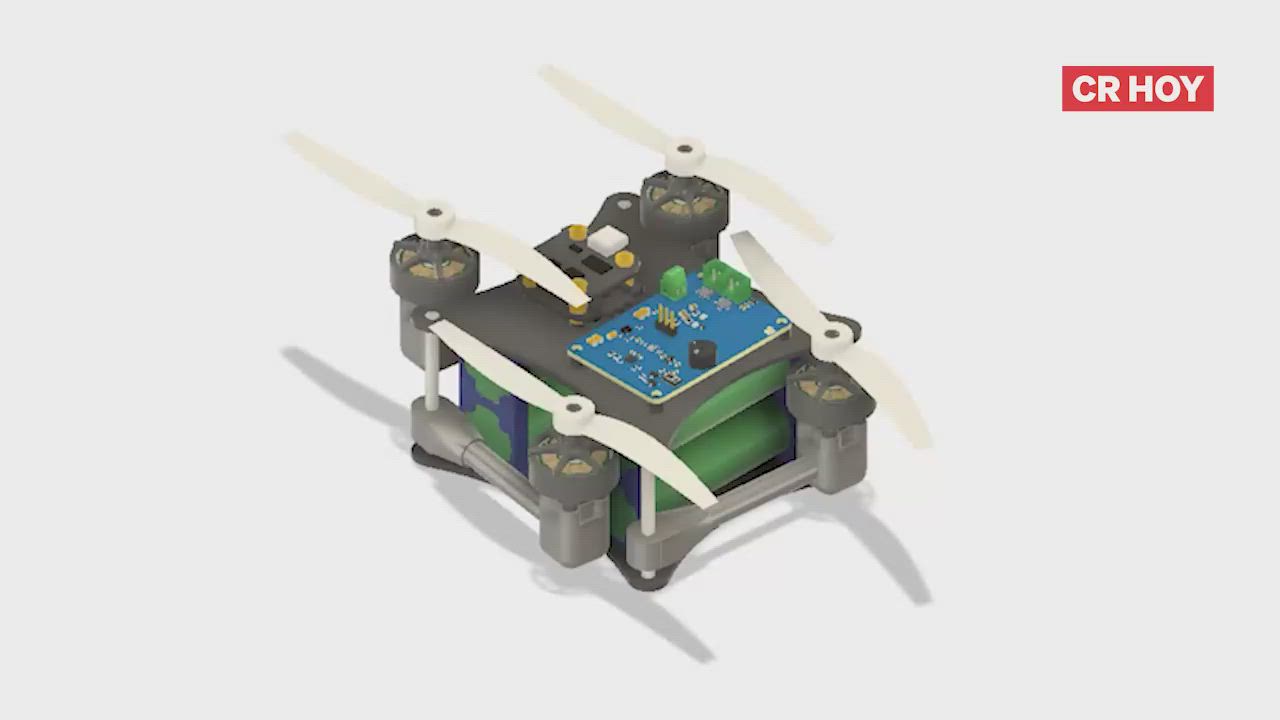
Equipo avanzado: dron "El Yigüirro"
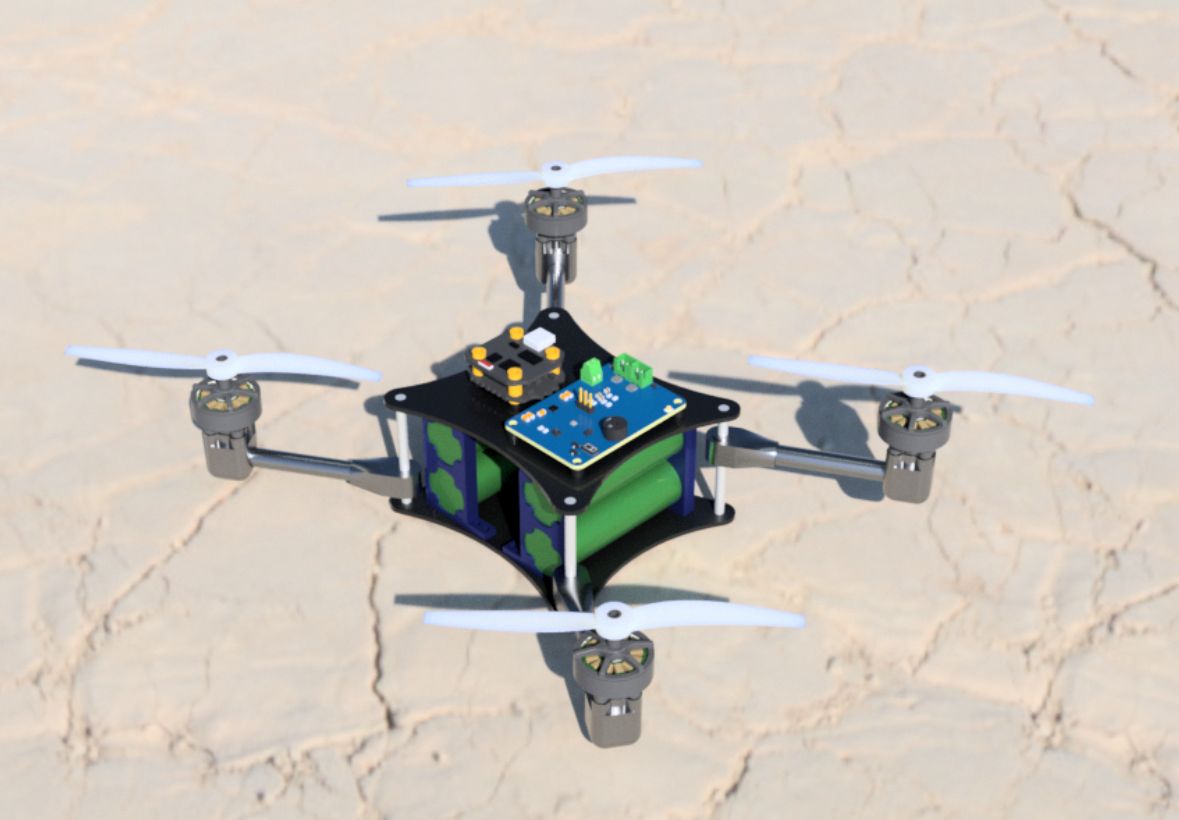
El equipo avanzado lanzará un dron llamado El Yigüirro, en homenaje al ave nacional costarricense. Este rover —vehículo robótico utilizado para explorar la superficie de otros planetas— fue diseñado completamente por los estudiantes, y cuenta con una placa estructural de fibra de carbono y brazos móviles.
Según explicaron a CR Hoy, los estudiantes Alexandra López Gutiérrez (capitana) y Bryan Martínez Aguilar, integrantes del equipo avanzado, debieron cumplir con requisitos como que el dron pese menos de un kilogramo, cumpla con dimensiones específicas y quepa dentro del cohete.
Su funcionamiento consiste en permanecer cerrado durante el vuelo. Una vez que cae con el paracaídas, se despliega automáticamente y comienza a volar. Posteriormente, debe completar una misión que, en este caso, consiste en un rescate ficticio en una montaña.
"Es un caso en el que una persona queda atrapada y el dron debe acercarse para evaluar su estado. Por eso integramos sensores para medir el pulso cardíaco y la oxigenación en sangre", explicó López a este medio.
Martínez Aguilar detalló que todo el sistema es completamente autónomo, ya que: "una vez que se entrega al equipo de lanzamiento, no podemos intervenir ni enviarle instrucciones".
La electrónica se basa en una placa principal que detecta el momento del lanzamiento, la altura máxima y el punto de liberación del cohete. Luego, se activa una segunda placa que inicia el vuelo del dron y guía el dispositivo hasta la meta mediante sensores y algoritmos.
Entre los sensores incluidos hay altímetros, acelerómetros y sensores de orientación, que permiten que el dron mantenga la estabilidad incluso ante variaciones del terreno o del viento.
Además de López y Martínez, otros estudiantes que han trabajado con el equipo avanzado son María Fernanda García Rosales, Jorge José Torres Meza, Marco Rosales Castillo, Heillery Josué Enríquez Ramírez, Priscila Hernández Góchez, Ana Melissa Vásquez Rojas y María Paula Cruz Madrigal.
Equipo básico: rover "Morpho"
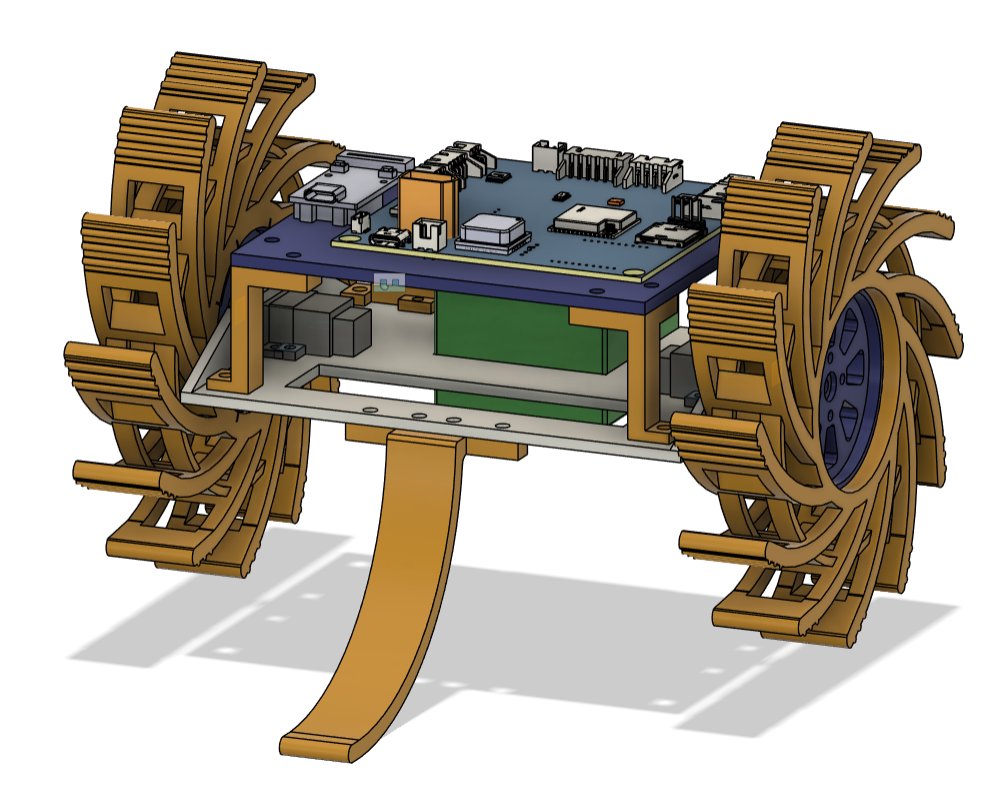
En el caso del equipo básico, los estudiantes presentarán un rover inspirado en la mariposa Morpho, específicamente en la especie Helenor, también conocida como mariposa morfo azul, común en Centro y Sudamérica.
Este rover es un CanSat, es decir, un satélite en miniatura del tamaño de una lata. Debe cumplir con restricciones muy específicas de peso (menos de un kilogramo) y tamaño para poder ser alojado dentro del cohete. Por ejemplo, el diámetro de las llantas no puede superar un límite definido.
Los estudiantes Daniel Ang Rivera, José Fabio Viales Solís, Alina María Milán Zárate y Derian Benavides Venegas forman parte del equipo y explicaron que muchas de las piezas fueron impresas en 3D, utilizando diferentes programas.
Posteriormente, han realizado múltiples pruebas para comprobar la resistencia, estabilidad y funcionalidad del rover. Entre estas se incluyen pruebas de caída desde 15 metros para evaluar la apertura del paracaídas, la resistencia del envoltorio y el impacto sobre los motores y la batería.

Al igual que el equipo avanzado, los estudiantes deben cumplir una misión. En este caso, se trata de entregar una carga de 5×5×5 cm, simulando, por ejemplo, una entrega en Marte.
La carga está sujeta mediante un sistema de hilo que se libera gracias a una resistencia piroeléctrica que lo quema, lo que permite que la carga caiga en el objetivo. Para cumplir su misión, el rover también utiliza varios sensores: magnetómetro, sensor de luz, barómetro, acelerómetro, giroscopio, GPS, cámaras, entre otros. Estos permiten que el dispositivo avance de forma autónoma hacia la meta y transmita datos a la base.
Además de los estudiantes ya mencionados, también participaron en el proyecto Paula Forero Garfía, Melissa Quesada Carazo, Fabiana Cordero Cordero, María Fernanda Chaves Chaves y Efraín Rojas García.
Buscan patrocinadores
Actualmente, los integrantes de ambos equipos desarrollan los proyectos de forma voluntaria y ad honorem, dedicando muchas horas de esfuerzo y compromiso fuera del horario académico.
Señalan que una de las principales dificultades que enfrentan es conseguir apoyo económico. Participar en una competencia internacional como ARLISS, desarrollar dispositivos aeroespaciales funcionales y cubrir los gastos de transporte, materiales, hospedaje y logística implica un alto costo. Por ello, han buscado acercarse a empresas y patrocinadores que crean en su trabajo y visión.
Si alguna persona, empresa u organización desea colaborar con esta iniciativa —ya sea mediante donaciones, patrocinio o cualquier otro tipo de apoyo—, actualmente se encuentran abiertos a todas las formas posibles de ayuda.
Una de las opciones que ofrecen a las marcas patrocinadoras es colocar su logotipo en los dispositivos que llevarán al desierto de Nevada, otorgándoles visibilidad internacional dentro del contexto académico y científico de la competencia.
Para establecer contacto directo con los estudiantes y coordinar una posible colaboración, pueden escribir a los siguientes correos electrónicos: daniel.ang@ucr.ac.cr y yerlin.lopez@ucr.ac.cr.














